Nous vous présentons ROBY, un petit robot original.


Né au Labo-Cesson courant du premier semestre de 2019, selon un cahier des charges minimaliste et ouvert pour préparer de futures évolutions de ce robot, encore en cours de développement.
A minima, ce robot se veut être différent de ce qui existe déjà, être facile à construire, être peu coûteux, être capable de manipuler des charges de quelques centaines de grammes, être capable d’apprentissage et de reproduire une série d’actions apprises ou programmées.
Quelques indications sur sa constitution :
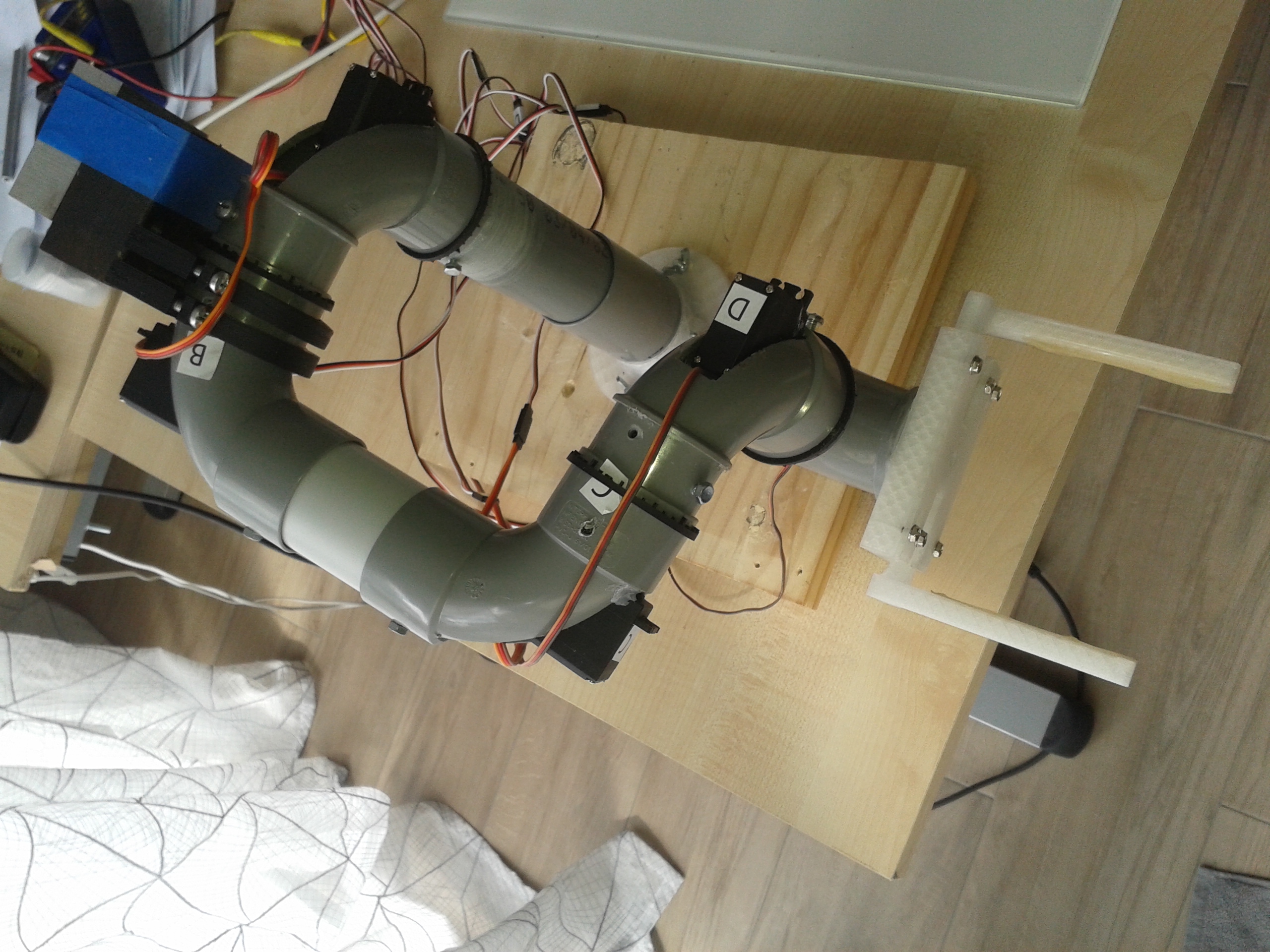
Il à une morphologie de bras manipulateur industriel avec 4 degrés de liberté ; rotation 180°, levage 90°, direction 180° et pince à deux doigts.
Son mécanisme est partiellement équilibré par une masse métallique pour soulager le servomoteur de levage,
Le bras est équipé d’un parallélogramme pour maintenir la pince parallèle au plan de travail quelque soit l’inclinaison du bras.
Il est constitué de coudes PVC de plomberie, de caractéristiques constantes, facile à usiner, choisis pour que chaque élément puisse être utilisé de façon modulaire, comme base d’un jeu de construction.
Le guidage des articulations est assuré par des roulements à billes.
Les moteurs sont des servomoteurs standard, 90 et 180°, de couple nominal 15 ou 25 kg/cm.
La commande est assuré par un microcontrôleur Arduino Uno.
L’interface de commande autonome est constituée de potentiomètres à glissières. Accessoirement, du terminal série de l’Arduino.
Le logiciel est spécifique à ce projet, et basé sur des contributions open-source.
En l’état, ce robot est constitué d’une succession de prototypes, il ne peut être reproduit tel quel.
Lorsque le développement de ROBY sera achevé, nous publierons, ici, ses caractéristiques détaillées, la liste de ses pièces, les dessins de ses constituants, à reproduire avec une imprimante 3D, les indications de montage, le logiciel.
Si ce robot vous intéresse, adressez un courriel à : contact@labocesson.fr